

タミヤ戦車はまっすぐに走れない。
構造上の理由もあるしモータの性能差や床のスリップも生じるし・・・等々
じゃがmicro:bitには電子コンパスがある!
フォロと違って我が戦車はmicro:bitを水平におけるんじゃ!
とずっと信じてきた。
で、ここ3日間これを使って回転角指定の超信地旋回、直進のズレ補正を目指して頑張った。
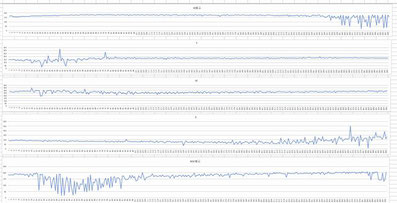
とにかく変なデータを読む。
グラフはモータの直上にmicro:bitを置いていた場合のデータ

モータの磁力線が悪さをしてるのかと、micro:bitを20mm浮かしたら少し改善したように見える。
初期のデータに比べればブレの振幅が小さくはなっているが、それでもスパイク状のデータを読み込む。
東西南北4方向に走らせて取得した値をグラフにしたものだが、何度改善しても、最低でも1方向がメチャクチャばらついたデータになる。

今度はmicro:bitを反対側に設置して40mm浮かした。
朝から晩まで、改善とデータ取得・グラフ化に何十回も費やしたが、結局実用レベルには至らなかった。
何が至らないのか。もう疲れ果てた。

はい、ということで
これがカンペキに左右90度曲がるプログラムです。
ブレーキもかかってピリッと停止します。
秋プラデモの用途ではこれで十分です。
ただし、電池電圧絡みや機構の動作不具合への補正が必要
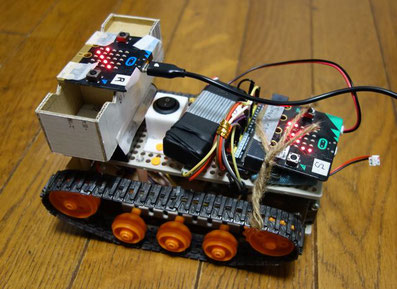
物理的なパッチにつぐパッチ当てで・・・
見るも無惨な姿になりました。
麻縄縛りがなかなかいい感じにキマってるw
ついでにmicro:bit側への電源電圧低下問題(かな?)も露見しました。