

そろそろ、本気でプログラミングに入らないとマズイ
マイクロビットも横向き設置で進行方向とジャイロセンサの向きも一致しない、そもそもどちらが進行方向かもわかってない、モーターとドライバ基盤の結線も適当、電源配線が赤黒逆(中華ケーブルの闇)・・・
このまま完成版としてコーディングするとヤバすぎ。
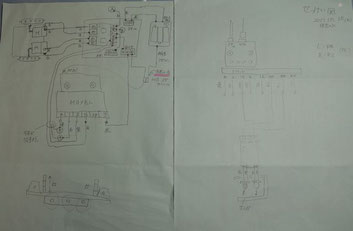
ということで完全分解し、回路図も起こしました。
案の定、前進命令を入れたら後退をしたw
多分、左右モータのピン番号も逆になってると思う。

途中、中華の闇から買った配線部材が2箇所破断発生するなどトラブル続出で、結局完全分解を2回するはめに。
丸1日かかった。
付いてなかった電源スイッチも付けた。
これがないために配線巻き込み切断事故も発生してる。

お飾りで超音波センサーもくっつけた。ちょっとロボット戦車風になったでしょ?
これがないとどっちが前かわからんから。
実はこの超音波センサはスピーカだけで発振回路などついてない製品
8年前に秋月で購入600円
今や200円程度で通信機能まで付いた基盤が売られてる(悲)