

フォロやブラシモータを使ったロボットでは走行距離や向きを正確に把握・制御は結構難しい。
その点ステッピングモータは正確な制御が可能・・・
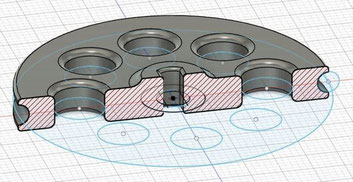
ということで、戦車を中断しステッピングモータ用の車輪を作ってみた。
実は1年毎に無償利用が更新出来たはずのFusion360が裏切ったらしく、継続不可能に。
別アカウントを取得しても30日の延期がやっと。
なので最近は焦って、作成予定の部品をあれこれ印刷しまくり。
それが忙しくて戦車が全然進まない。
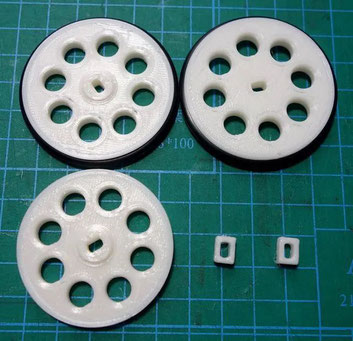
ホムセンで直径60mm程度のOリングを購入し作った溝へはめ込む。
試作品2個めで完成したのは奇跡的
なかなかいい具合です。
試作品一個目はOリングの直径設定を誤って車輪が大きくなりすぎてブカブカ・・・廃棄するしかない(泣)